6D Assembly Pose Estimation by Point Cloud Registration for Robot Manipulation
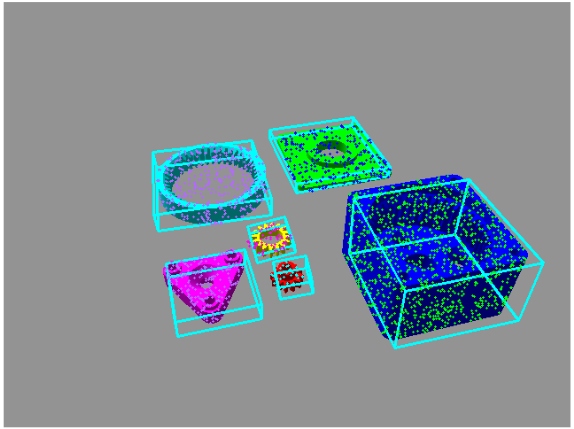
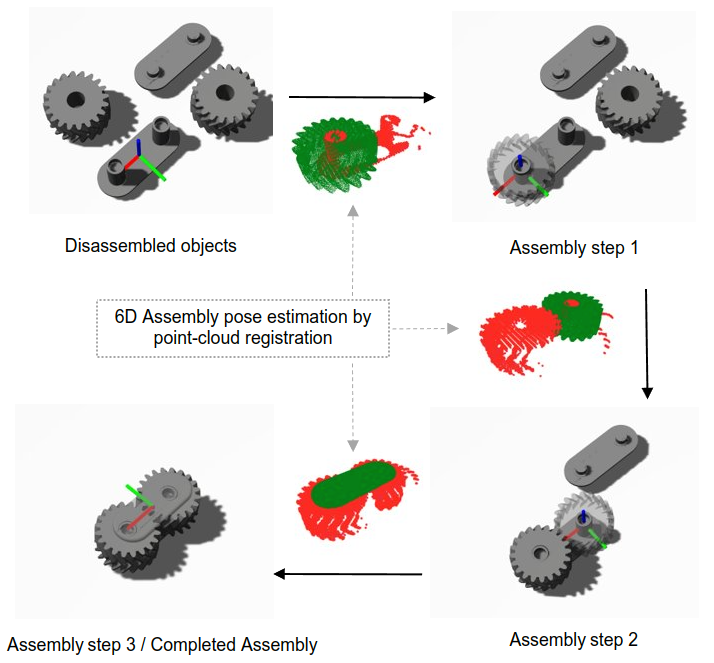
A proposed framework for robotic assembling with semantic segmentation of the scene and registering point clouds of local surfaces against target point clouds derived from CAD models in order to detect 6D assembly poses.
December 30, 2024
15 min read, 3619 words